Overview
Towards Human-Centric and Physics-Aware Automated Mobility
The globally connected and autonomous mobility industry, growing at a rapid pace, is an intrinsically multidisciplinary field that aims at designing advanced onboard control logics by integrating principles from different disciplines including Mechanical, Control and Computer Science Engineering with implications even on Legal, Social and Economic fields.
To ensure the successful adoption of connected automated mobility solutions and so achieve public acceptance, autonomous vehicles must turn out to be safe, reliable and comfortable in all driving conditions.
The performance of modern driving assistance systems can considerably decrease in particularly crucial safety-critical situations, where the environmental conditions (rain, snow, ice), the road singularities (oil stains, puddles, holes) and the tyre thermal and ageing phenomena can deeply affect the friction potential thus weaken the vehicle safety. Furthermore, in autonomous driving the conversion of the human drive into a passenger equals the loss of an optimal controller of motion sickness: the human driver himself.
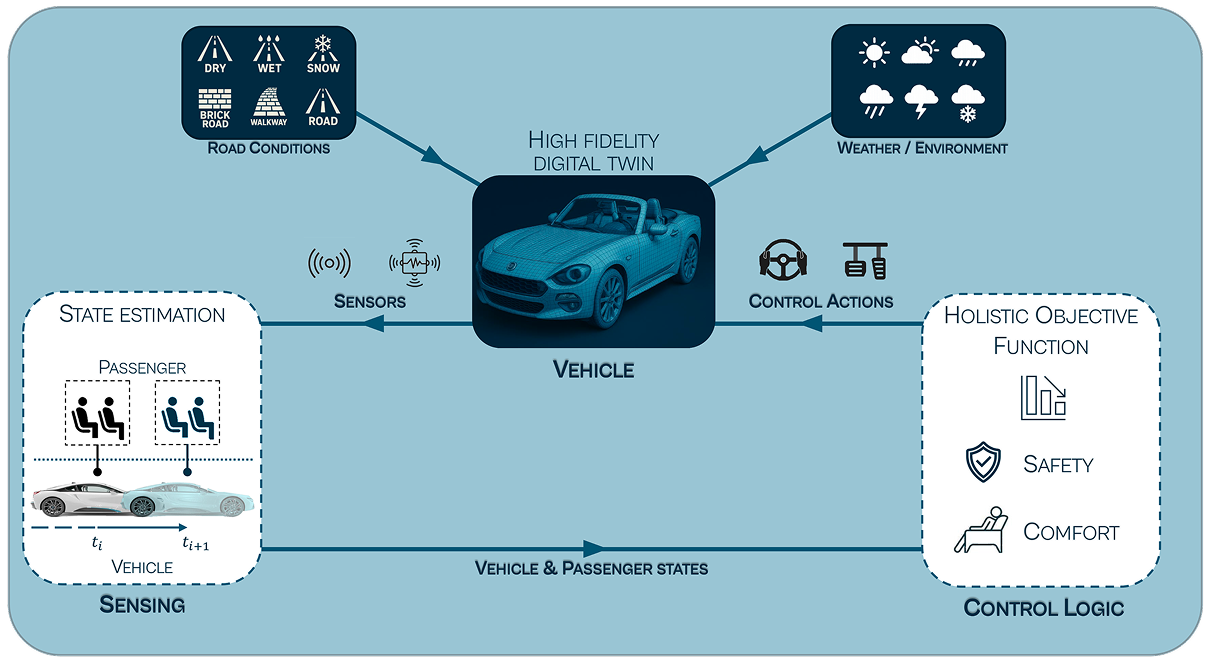
The overarching goal of the project is to integrate the information concerning the tyre dynamic limits and the passenger state within advanced driver assistance systems, demonstrating the advantages in terms of both enhanced active safety and optimized performance. The knowledge of the instantaneous and potential grip and of the passengers’ state and supportable stress limits, directly onboard and in real-time, will permit the vehicle control logic from one hand to maximize the potential to avoid obstacles and to reduce the severity of collision, and from the other hand to drive comfortably in normal situations.
The multidisciplinary proposal will provide a paradigm shift in the development of strategies and a solid break-through towards enhanced development of the driving automatization systems, unleashing the potential of physical modelling to the next level of vehicle control, able to exploit and to take into account the multiphysical tyre variations and the occupants’ wellbeing limits.