Vehicle and Passenger oriented holistic motion planning
for Autonomous Driving.
Towards Smarter, Safer Mobility
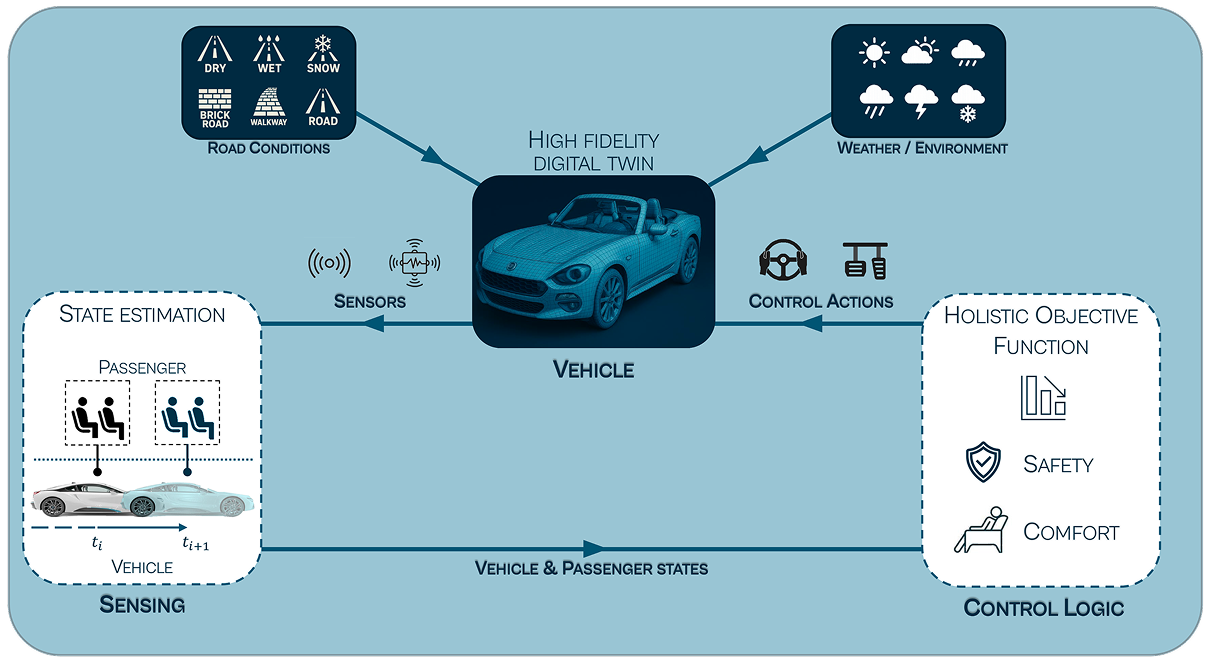
The HoMo-AD project aims to advance driving assistance systems by integrating real-time tyre limits and passenger state into vehicle control. Through a sophisticated multidisciplinary approach employing a highly reliable parametrized vehicle model, validated in different ambient-weather and road pavement conditions, the model-based control logics enable a holistic motion strategy that accounts for vehicle dynamic behavior and passenger well-being.
Overall simulation framework
Featured events
•ICCVVN-25; Connected vehicles and vehicular networking; 7/12/2025
•FKFS Stuttgart; Automotive and engine technology; 7/2/2025
•ICAMMPHY-25; Applied Mathematics, Mechanics and Physics; 9/8/2025
•VEHITS 2025; Vehicle technology and intelligent transport; 4/2/2025
•ICINCO 2025; Intelligent Control Systems, Optimization, Robotics, Automation, Signal Processing, Sensors, Systems Modelling and Control, and Industrial Informatics; 10/20/2025
•CASE 2025; Automation Science and Engineering; 8/17/2025